Suvi Nikula ja Mirka Leino, Satakunnan ammattikorkeakoulu
Yhteistyörobottien käyttökohteet ja hyödyt eroavat osittain perinteisistä teollisuusroboteista. Juuri näiden eroavaisuuksien perusteella on valittava täsmälleen kyseessä olevaan sovellukseen sopiva robotti. Ei ole kuitenkaan itsestään selvää, missä tapauksissa yhteistyörobotti kannattaa valita perinteisen teollisuusrobotin sijaan. Onkin siis tarpeen eritellä yhteistyörobottien hyötyjä ja niille soveltuvia käyttökohteita.
Yhteistyörobottien ja perinteisten teollisuusrobottien eroavaisuudet
Teollisuusrobotit ovat isoja, vahvoja ja jykeviä laitteita, jotka pystyvät käsittelemään painavia ja suuria kappaleita. Ne työskentelevät määrätyissä tehtävissä, jotka on suunniteltu juuri niille sopiviksi. Teollisuusroboteilla on tarkoitus automatisoida valmistusprosessi lähes kokonaan, eli suorittaa se ilman ihmisapua. Ihmiset vapautetaan kokonaan kyseessä olevista, mahdollisesti terveydelle haitallisista tehtävistä. Teollisuusrobotit on ympäröity erilaisilla suojalaitteilla tai suljettu häkkeihin (kuva 1). Niistä on tehty kirkkaan värisiä, jotta ne värillään varoittavat ympärillä työskenteleviä työntekijöitä edustamastaan vaarasta. Perinteisiä teollisuusrobotteja voidaan myös käyttää yhteistyöhön, jolloin ne yleensä täytyy varustaa täydentävillä ulkopuolisilla valvontalaitteilla, ollakseen riittävän turvallisia ihmisten läheisyydessä. Näiden robottien käyttöönotto vaatii edistyneitä ohjelmointitaitoja ja jos ohjelmaan pitää tehdä joitakin muutoksia, tarvitaan asiantuntija ne tekemään. (Robotiq n.d.a; Roel 2017.)
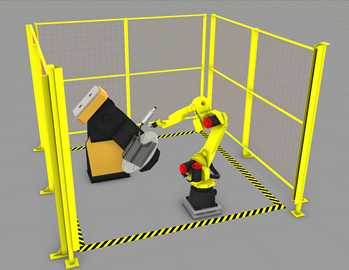
Kuva 1. Teollisuusrobotti turva-aidattuna.
Yhteistyörobotit on suunniteltu juuri työskentelemään ihmisten kanssa, eikä korvaamaan heidän työpanostaan. Niitä ei ole suunniteltu raskaisiin teollisuuden valmistustehtäviin, vaan niiden on tarkoitus avustaa ihmisiä tehtävissä, jotka ovat liian vaarallisia, raskaita tai väsyttäviä ihmisen yksin tekemäksi. Yhteistyörobotit on varustettu integroiduin anturein, jotka havaitsevat ulkoisia voimia ja voimien ollessa liian suuria, ohjaavat robotit pysähtymään. Koska ulkoisia turvajärjestelyjä ei tarvita, on yhteistyörobottien käyttöönotto huomattavasti nopeampaa ja samasta syystä niiden paikkaa voidaan siirrellä tarpeen mukaan työpisteeltä toiselle. Yhteistyörobotit voidaan helposti ohjelmoida uusiin tehtäviin käsin johdattamalla, ilman erityistä tietämystä ohjelmoinnista ja muutosten tekeminen ohjelmiin sujuu yhtä helposti. (Robotiq n.d.a; Roel 2017.)
Yhteistyörobottien tuomat hyödyt
Yhteistyörobotit avaavat uusia mahdollisuuksia toiminnan automatisointiin. Teollisuudenaloilla, joilla aiemmin ei ole osoitettu kiinnostusta robotiikkaan, on yhtäkkiä huomattu, että yhteistyötä toteuttavien tekniikoiden avulla myös heidän on mahdollista päästä käsiksi automatisoinnin tuomiin hyötyihin. Yhteistyörobottien ei ole tarkoitus korvata perinteisiä teollisuusrobotteja, vaan tuoda robotit käyttöön uusiin kohteisiin, joissa ne voivat helpottaa ja tehostaa prosesseja. (Greene 2018; Westmoreland 2018.)
Yhteistyörobotit ovat edullisempia
Yhteistyörobottien hankintahinta on usein ainakin jonkin verran perinteistä teollisuusrobottia edullisempi. Tämä johtuu muun muassa kevyemmistä rakenteista ja siitä, että niitä liikuttamaan riittävät pienemmät, pienitehoisemmat ja siis myös edullisemmat moottorit. Yhteistyörobotti ei myöskään vaadi ympärilleen suoja-aitoja ja vie näin ollen myös vähemmän tilaa tehtaalla. Näistä molemmista seikoista muodostuu säästöä. Lisäksi yhteistyörobottien ohjelmointi on helpompaa, eikä sitä varten tarvita kalliita asiantuntijoita. (Bélanger-Barrette 2015c; Davids 2017a; Greene 2018.)
Yhteistyörobotti tarvitsee vähemmän tilaa
Suurin osa perinteisistä teollisuusroboteista (kuva 2) vaatii korkean tason turvajärjestelyt, kuten aidat tai valoverhot. Niiden työssään käsittelemät kappaleet tuodaan robottisoluun useimmiten muiden automaattisten järjestelmien avulla. Robotin lisäksi nämä turvarakenteet, joiden on oltava riittävän loitolla jättääkseen robotille tilaa työskentelyyn, sekä muut automaatiolaitteet vievät runsaasti lattiatilaa. (Bélanger-Barrette 2015c; Busch 2018; Greene 2018.)
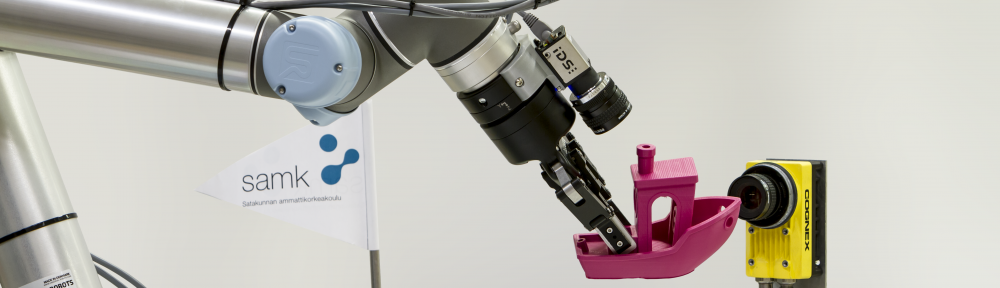
Yhteistyörobotit (kuva 2) ovat nimensä mukaisesti kykeneviä yhteistyöhön. Ne pystyvät työskentelemään rinta rinnan ihmisten kanssa ilman tarvetta ulkoisiin turvajärjestelyihin. Koska tilaa vieviä aidattuja turva-alueita ei tarvita, robottisovelluksia voidaan viedä paikkoihin, joissa ne eivät ole ennen olleet toteuttamiskelpoisia. (Greene 2018; Westmoreland 2018.)

Kuva 2. Yhteistyörobotti vasemmalla ja perinteinen teollisuusrobotti oikealla.
Yhteistyörobotti työskentelee harmoniassa ihmisten kanssa
Yhteistyörobotti ottaa aina huomioon samassa työtilassa liikkuvat ihmiset. Millä tavalla ihmiset huomioidaan ja miten heihin reagoidaan, riippuu kunkin robottisovelluksen toteutustavasta. Näin vältetään onnettomuudet ja lisäksi sallitaan ihmisen ja robotin työskentely samassa tilassa. Parhaimmillaan yhteistyörobotti avustaa ihmistä tämän työssä ja päinvastoin. Tämä mahdollistaa toimintojen korkeamman tuottavuuden saavuttamisen. (Busch 2018; Greene 2018.)
Yhteistyörobotin käyttöönotto on nopeaa ja helppoa
Yhteistyörobottien pieni koko mahdollistaa nopean ja helpon asennuksen. Ne voidaan asentaa pöydälle, työasemiin tai mobiileille alustoille ja ne mahtuvat myös ahtaisiin paikkoihin, joten ne on helppo integroida tuotannon olemassa oleviin rakenteisiin. Ohjelmointi on helppoa, joten robotti saadaan nopeasti käyttöön. Uuden ohjelman voi luoda jopa tunnissa. Robotin lisäksi ei tarvitse asentaa ulkoisia turvajärjestelmiä, joten aikaa säästyy siinäkin. Lisäksi robottiin liitettävä työkalu, jonka avulla tehtävät suoritetaan tai kappaleita käsitellään, on helposti vaihdettavissa. (Busch 2018; Greene 2018.)
Yhteistyörobotti on helppo ohjelmoida
Monien yhteistyörobottien mukana tulee helppokäyttöinen opetuspaneeli robotin ohjelmointia varten. Opetuspaneelin avulla lähes kuka tahansa pystyy helposti ja nopeasti opettamaan robotille uuden tehtävän. Uusi tehtävä voidaan opettaa robotille esimerkiksi johdattamalla se käsin toivottuihin työpisteisiin. Kun tuotantoon tulee uusi kappale tai ohjelmaan tarvitaan korjaus, voidaan muutokset tehdä heti, eikä paikalle tarvita erityisasiantuntijoita. Uuden ohjelman voi saattaa toimintaan jopa tunnissa. Yksinkertaisen ohjelmoinnin lisäksi yhteistyörobotit tarjoavat mahdollisuuden myös monimutkaisempien ohjelmien ja tehtävien tekoon. (Busch 2018; Greene 2018.)
Yhteistyörobotin voi siirtää tehtävästä toiseen
Sekä asennuksen että ohjelmoinnin nopeus ja helppous mahdollistavat yhteistyöroboteille ennennäkemättömän joustavuuden. Yhteistyörobotti voidaan periaatteessa siirtää mihin tahansa, missä sitä tarvitaan (kuva 3). Siirtäminen on yksinkertaista, koska mitään muita järjestelmiä ei tarvitse siirtää robotin mukana. Usein robotti onkin asennettu pyörillä kulkevalle alustalle. Kun robotille annetaan uusi tehtävä, on uusi ohjelma helppo tehdä. Jos robotti siirretään takaisin aiempien työtehtävien pariin, voidaan vanha ohjelma ottaa uudelleen käyttöön. (Busch 2018; Greene 2018.)
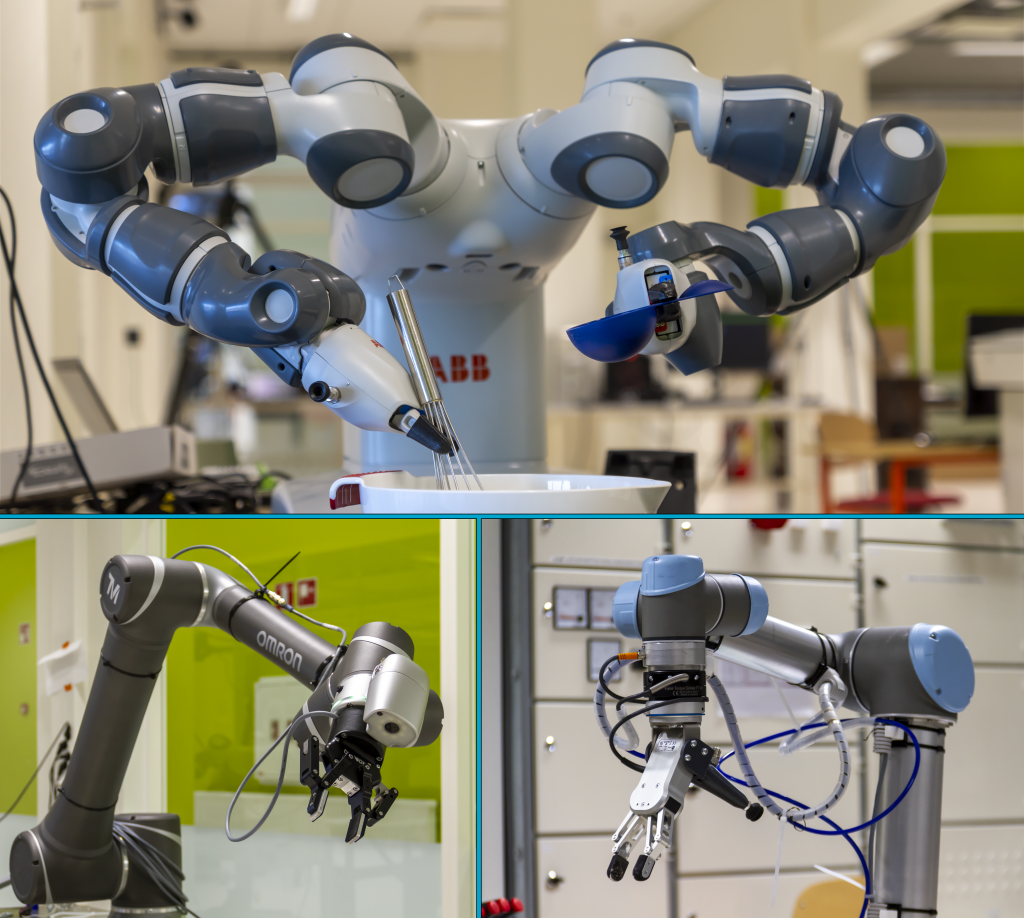
Yhteistyörobotteja erilaisissa tehtävissä.
LÄHTEET:
Bélanger-Barrette, M. 2015c. Why Are Collaborative Robots So Cheap? Viitattu 9.12.2018. https://blog.robotiq.com/why-collaborative-robots-are-so-cheap
Busch, N. 2018. Collaborative Robots Part 2: Benefits and Expanding Capabilities. Viitattu 8.12.2018. https://www.bastiansolutions.com/blog/index.php/2017/11/16/part-two-collaborative-robot-benefits-and-capabilities/
Davids, M. 2017a. How Today’s Collaborative Robots Are Cheaper Than Fenced Options. Viitattu 9.12.2018. https://blog.robotiq.com/how-todays-collaborative-robots-are-cheaper-than-fenced-options
Greene, M. 2018. Collaborative Robots Part 1: Pros, Cons, and Applications. Viitattu 8.12.2018. https://www.bastiansolutions.com/blog/index.php/2017/11/14/collaborative-robots-part-1-pros-cons-applications/
Robotiq. N.d.a. Cobots ebook. Viitattu 8.12.2018. https://blog.robotiq.com/hubfs/COBOT%20EBOOK%20FINAL.pdf
Roel, C. 2017. Know your machine: Industrial robots vs. cobots. Viitattu 8.12.2018. https://blog.universal-robots.com/know-your-machine-industrial-robots-vs.-cobots
Westmoreland, J. 2018. Reasons for collaborative robots in non-traditional industries. Viitattu 8.12.2018. https://blog.universal-robots.com/reasons-for-collaborative-robots-in-non-traditional-industries
