
Suvi Nikula ja Mirka Leino, Satakunnan ammattikorkeakoulu
Sopisiko yhteistyörobotti juuri yrityksenne tarpeisiin? Mikäli työtehtävä toistetaan samalla tavalla uudelleen ja uudelleen, jos robotin tauoton työpanos lisää tuottavuutta verrattuna ihmisen työpanokseen, tai työtehtävä on likainen, pitkäveteinen tai vaarallinen, voi automatisoinnista olla hyötyä. Yhteistyörobotti soveltuu lukuisiin tällaisiin tehtäviin. (Westmoreland 2018.)
Poimintasovellukset
Tuotteiden poiminta ja niiden asettelu, esimerkiksi tarjottimelta liukuhihnalle (kuva 1), on yksi toistuvimmista töistä, joita ihmiset tekevät. Työtehtävän toistuvuus saattaa johtaa rasitusvammoihin. Yhteistyörobotille tämä tehtävä sopii mainiosti toistettavuutensa ja käsiteltävien melko kevyiden tuotteiden ansiosta. Lisäarvoa saadaan käyttämällä konenäköä tuotteiden, niiden paikan ja asennon tai muodon tunnistamiseksi, jolloin tuotteiden lajittelu onnistuu ja niiden poimiminen on joustavampaa. (Gonzalez 2018.)

Kuva 1. Universal Robots UR5 poimii leikkelepaketin kuljettimelta.
Pakkaamissovellukset
Poimintasovelluksiin liittyvät myös pakkaamissovellukset. Nämäkin tehtävät ovat toistavia ja niissä käsitellään melko kevyitä tuotteita, joten tehtävinä ne ovat ihanteellisia yhteistyörobotille. Pakkaamissovelluksiin voidaan lukea kuuluvaksi tuotteiden pakkauksiin asettelun lisäksi pakkauslaatikoiden kokoaminen tai tuotteiden sulkeminen kutistekalvoon. Hauraiden tuotteiden käsittelyssä yhteistyörobotin voimia tunnistavat ominaisuudet pääsevät oikeuksiinsa ja niiden avulla robotti voi myös avustaa ihmistä pakkaamisessa. Tässäkin tehtävässä konenäön avulla saadaan lisäarvoa, kun tuotteet voidaan poimia esimerkiksi liikkuvalta liukuhihnalta pakattaviksi. (Bélanger-Barrette 2015a; Davids 2017b; Gonzalez 2018.)
Palletointi, eli pakkausten latominen kuormalavoille
Edelleen poimintasovelluksiin liittyen yhteistyörobotti on omiaan myös pakkausten latomisessa kuormalavoille kuljetusta varten (kuva 2). Tehtävä on toistuva ja kuormien ollessa melko kevyitä, suoriutuu yhteistyörobotti siitä helposti. Konenäön avulla robotti voi itsenäisesti sovittaa eri muotoiset tai kokoiset pakkaukset lavalle. (Gonzalez 2018.)
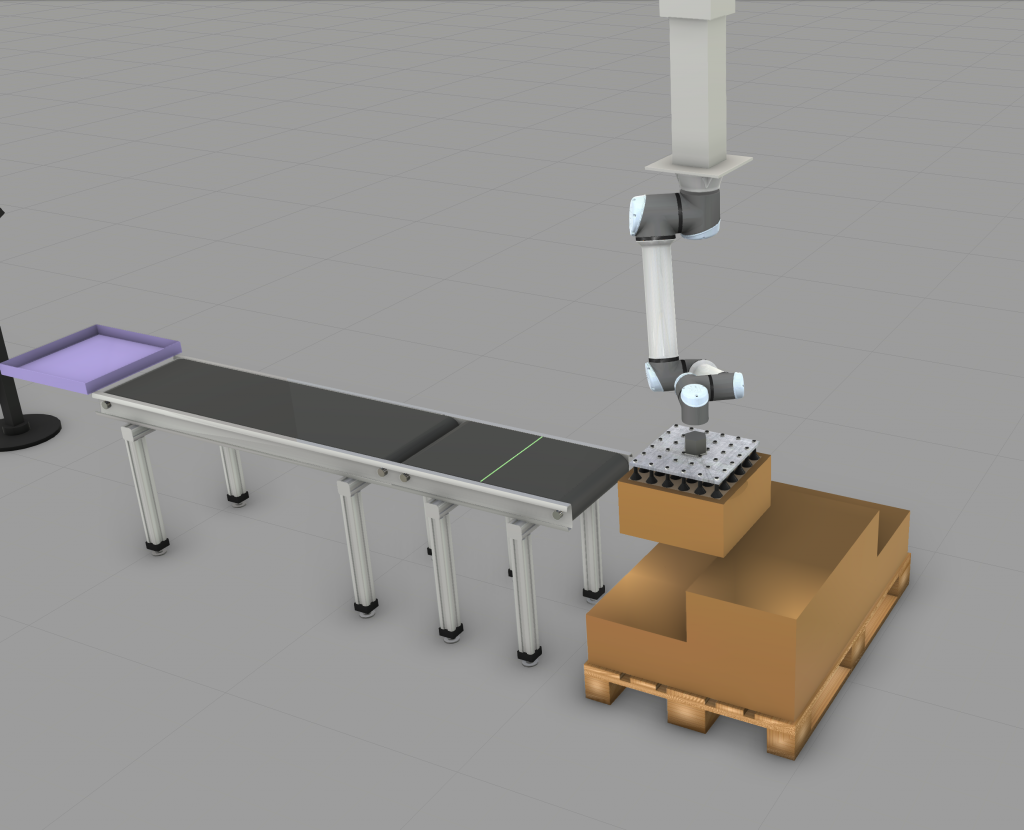
Kuva 2. Simulaatio Universal Robotin palletointisovelluksesta.
Työstökoneiden syöttö
Työstökoneille raaka-aineita syötettäessä tai työstöön tarvittavaa työkalua vaihdettaessa työajasta kuluu iso osa odotamiseen koneen tehdessä työtään. Työtehtävänä odottelu ei ole mielekästä, joten yhteistyörobotti soveltuu hyvin tähän toimeen, vapauttaen ihmisen muihin tehtäviin. Erityisesti sellaisissa pk-yrityksissä, joissa tuotteita on laaja valikoima, mutta tuotantoerät varsin pieniä, on joustava yhteistyörobotti helppo siirtää yhdestä syöttötehtävästä toiseen. Yhteistyörobotti pystyy huolehtimaan samanaikaisesti useammankin työstökoneen palvelusta. Työstökoneisiin lukeutuvat CNC-koneiden lisäksi ruiskuvalukoneet, pienelektroniikan testauslaitteet, 3D-tulostimet, etiketöintilaitteet sekä monet muut. (Bélanger-Barrette 2015a; Gonzalez 2018; Robotiq 2018.)
Kokoonpanon tehtävät
Yhteistyörobotti kykenee yhdistämään osia jatkuvasti samalla tavalla ja väsymättä. Konenäön avulla osat voidaan poimia liukuhihnalta, tunnistaa ja tarvittaessa kääntää, sekä sovittaa yhteen joustavasti (kuva 3). Yhteistyörobotti kykenee hallitsemaan voimaa, joka tarvitaan kappaleiden yhteen painamiseen. Kokoonpano voidaan tehdä myös yhteistyössä ihmisen kanssa, jolloin molemmat tuovat oman osaamisensa mukaan työhön ja työstä saadaan tehokkaampaa. (Davids 2017b; Robotiq 2018.)
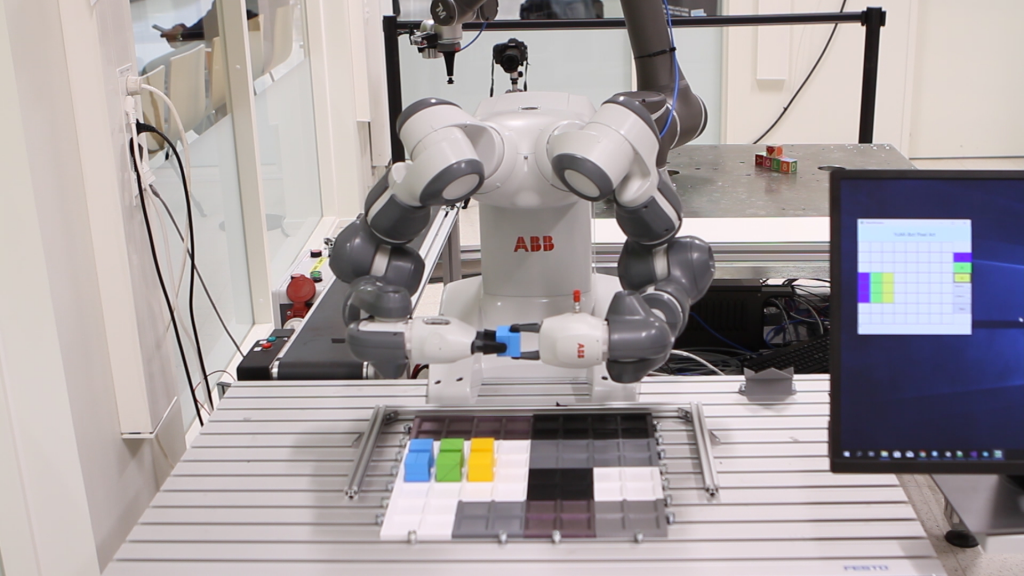
Kuva 3. ABB YuMi -yhteistyörobotti kokoonpanotehtävissä.
Laadunvalvonnan avustaminen
Valmiiden osien tai tuotteiden laadun tarkkailu voidaan suorittaa tehokkaammin yhteistyörobotin avulla. Robotti pystyy tarjoamaan konenäkökameralle tarpeellisen määrän kuvakulmia tarkan laadunvalvonnan suorittamiseksi. Robottiin yhdistettynä konenäkö siis saavuttaa nopeasti riittävän määrän tietoa määrittääkseen onko kappale oikeanlainen. Konenäön avulla voidaan esimerkiksi verrata valmista tuotetta CAD-malliin ja selvittää, ovatko kappaleen kaikki piirteet olemassa ja oikeanlaisia. Kiinnittämällä useamman konenäkökameran yhteistyörobottiin, voidaan tehtävä suorittaa entistä tehokkaammin. (Gonzalez 2018.)
LÄHTEET:
Bélanger-Barrette, M. 2015a. 3 Best Collaborative Robot Applications. Viitattu 9.12.2018. https://blog.robotiq.com/3-best-collaborative-robots-applications
Davids, M. 2017b. The 3 Most Common Tasks Delegated to Robots in Manufacturing. Viitattu 9.12.2018. https://blog.robotiq.com/the-3-most-common-tasks-delegated-to-robots-in-manufacturing
Gonzalez, C. 2018. 7 Common Applications for Cobots. Viitattu 9.12.2018. https://www.machinedesign.com/motion-control/7-common-applications-cobots
Robotiq. 2018. Part-1 Getting Started with Collaborative Robots. Viitattu 10.12.2018. https://blog.robotiq.com/hubfs/Getting-Started-Bundle.zip?hsLang=en-ca&t=1543374789968
Westmoreland, J. 2018. Reasons for collaborative robots in non-traditional industries. Viitattu 8.12.2018. https://blog.universal-robots.com/reasons-for-collaborative-robots-in-non-traditional-industries
