Pauli Valo, Satakunnan ammattikorkeakoulu
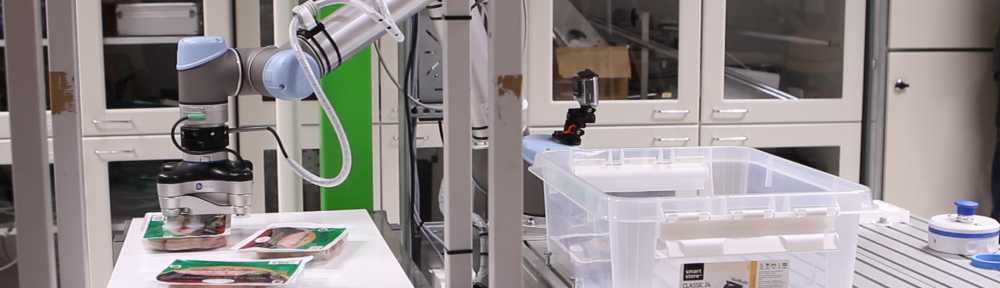
Tässä esimerkissä laserskannaukseen perustuva 3D-kamera ohjaa yhteistyörobottia kuljettimella kulkevien leikkelepakkausten poimimisessa ja laatikoihin pakkaamisessa. Tässä 3D-kuvauksella on merkittävä rooli, koska sillä tunnistetaan leikkelepakkauksen koko, korkeus ja asento kuljettimella, jolloin robotti osaa aina tarttua juuri oikeasta kohdasta. Tällainen sovellus voisi olla linjastolla, jossa kulkee pakattavaksi samanaikaisesti erilaisia ja erikokoisia pakkauksia, koska 3D-kuvauksella robotille saadaan joka pakkauksen osalta tietoa siitä, mikä pakkaus on kyseessä ja näin robotti osaa pakata samanlaiset pakkaukset samaan laatikkoon tai tilauksen mukaan koota useita tuotteita sisältäviä laatikoita.
